
Redação do Site Inovação Tecnológica
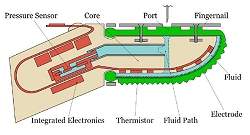 |
| Visão interna da estrutura de um dos dedos da mão biônica, dotada de tato.[Imagem: Jeremy Fishel] |
O projeto de mãos biônicas - que possam ser implantadas em pacientes amputados - sempre esbarra na falta de um nível de sensibilidade que possa em alguma medida lembrar o tato humano. Embora seja possível controlar os movimentos do dispositivo robótico com precisão, esse controle depende do feedback provido pelo tato.
"Instinto" robótico
Agora, a equipe dos professores Jeremy Fishel e Nicholas Wettels, da Universidade do Sul da Califórnia, apresentou o projeto de um sensor que permite que a mão robótica tenha até mesmo uma espécie de "instinto", alterando prontamente a força exercida se o objeto tender a escorregar entre os dedos.
Sensor vibrotáctil
O novo sensor foi chamado de vibrotáctil porque ele detecta minúsculas vibrações na pele artificial da mão biônica que possam indicar que o objeto está escapando do controle, permitindo o ajuste da força necessária para segurá-lo.
As próteses robóticas atuais exigem que o implantado estime conscientemente a força necessária para segurar os diversos objetos, variando essa força para não quebrar objetos muito sensíveis.
O sensor vibrotáctil é formado por um gel de silicone inserido por baixo de uma pele artificial de borracha. Quando o objeto começa a escorregar, as vibrações na pele elástica são transmitidas através do gel para sensores acústicos instalados nos "ossos" artificiais dos dedos da mão biônica, feitos de acrílico.
O sistema de controle da mão biônica recebe as informações desses sensores acústicos e altera imediatamente a força para fazer com que o objeto pare de escorregar. O processo é feito por incrementos sucessivos de forma extremamente rápida.
Pele sensorial artificial
A pele sensorial artificial tem ainda uma outra vantagem: ela permite que a sensação de tato seja repassada para o usuário para que ele de certa forma sinta o que está segurando e a força que está sendo exercida.
Isto é feito por meio de minúsculos eletrodos que cobrem o osso artificial de acrílico. Quando a pele artificial se deforma ligeiramente ao segurar um objeto, a energia conduzida por esses eletrodos se altera.
A informação dos eletrodos é repassada para um atuador de pressão instalado no braço do usuário, que aumenta ou diminui a pressão exercida sobre a pele do portador da mão biônica para dar-lhe uma sensação da força que está sendo exercida pela mão robótica.
Nenhum comentário:
Postar um comentário